
研究者らは、Waymoが発表したMotionLMという手法を用いて、道路上の交通参加者の将来の行動を言語モデルで予測しています。
従来の手法とは異なり、MotionLMは複雑な最適化手順を必要とせず、優れた性能を示しており、自動運転分野で重要な役割を果たすと期待されています。
この手法は、時間的な因果関係をシミュレートすることで予測精度を向上させており、自動運転車の安全な走行計画に不可欠です。
研究者らは、Waymoが発表したMotionLMという手法を用いて、道路上の交通参加者の将来の行動を言語モデルで予測しています。
従来の手法とは異なり、MotionLMは複雑な最適化手順を必要とせず、優れた性能を示しており、自動運転分野で重要な役割を果たすと期待されています。
この手法は、時間的な因果関係をシミュレートすることで予測精度を向上させており、自動運転車の安全な走行計画に不可欠です。


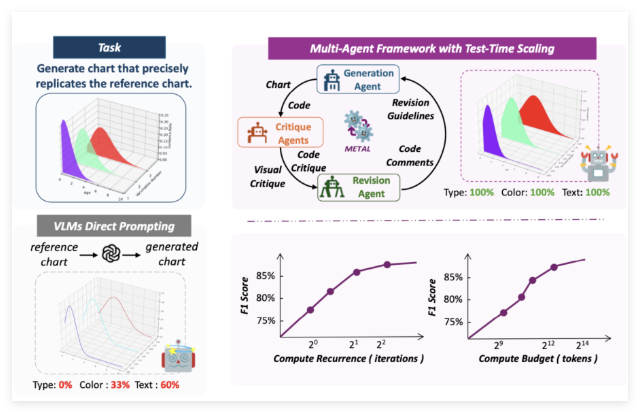
今日のデータ可視化の分野において、複雑なデータを正確に反映した図表を生成することは依然として難しい課題です。図表は正確なレイアウト、色、テキストの位置を捉える必要があるだけでなく、これらの視覚的な詳細をコードに変換して、意図したデザインを再現する必要があります。しかし、従来の方法では、GPT-4Vなどの視覚言語モデル(VLM)への直接的なプロンプトに依存することが多く、複雑な視覚要素を構文的に正しいPythonコードに変換する際に困難に直面します。小さな間違いでも、図表がデザイン目標を達成できない可能性があります。

2月28日、工業情報化部は『スマートコネクテッドカー製品の許認可、リコール、およびソフトウェアのオンラインアップグレード管理と技術ガイドライン』を発表し、スマートコネクテッドカーシステムは、運転手が組み合わせ運転支援機能を適切に使用していない場合、対応する機能の起動を禁止するなどの制限戦略を備えている必要があると明確に規定しました。この新しい規則は、スマート運転支援システムの安全性和制御性をさらに向上させることを目的としています。ガイドラインによると、スマートコネクテッドカーシステムは、明確な起動、実行、および終了戦略を備えている必要があります。走行支援機能に関しては、システムが運転手が運転任務から離れ、警告に応答していないことを検出した場合、