
相关AI新闻推荐

Figure推出新型智能模型 Helix,让人形机器人接受语音命令做家务
最近,Figure 创始人兼 CEO 布雷特・阿德科克(Brett Adcock)发布了一种新的机器学习模型 Helix,旨在提升人形机器人在家庭环境中的应用能力。这一消息正值 Figure 宣布与 OpenAI 的合作结束仅两周,显示出他们在机器人技术领域的坚定决心。Helix 是一个 “通用型” 的视觉 - 语言 - 行动(VLA)模型,能够通过视觉数据和语言指令来实时控制机器人。它的工作原理与谷歌 DeepMind 的 RT-2相似,后者通过视频与大型语言模型的结合训练机器人。Helix 则更进一步,它展示了强大的物体通用性,能够识别

Figure AI推出革命性双机协作AI模型Helix,赋能人形机器人新未来
在机器人技术领域,美国创业公司 Figure AI 于近期发布了一款名为 Helix 的端侧大模型,标志着人形机器人控制技术的重大突破。Helix 是首个能够对整个人形机器人上半身(包括头部、躯干、手腕和手指)进行高频率、连续控制的视觉 - 语言 - 动作(VLA)模型。这意味着,机器人可以在无需大量训练的情况下,直接根据自然语言指令执行任务。Figure AI 通过建立两个互补的系统来解决视觉语言模型的通用性和速度之间的矛盾。系统一是一个快速反应的视觉运动策略模型,能够每秒执行200次精确动
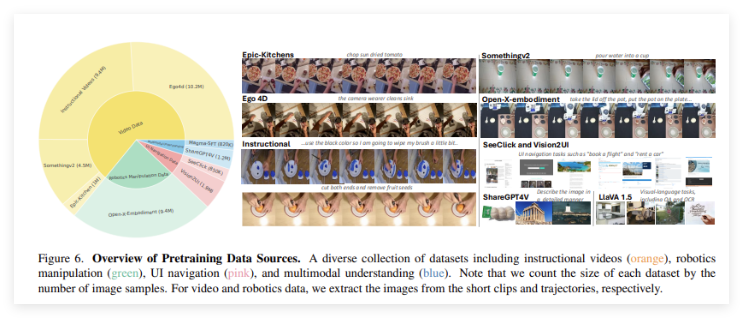
微软团队推多模态AI模型Magma:整合视觉、语言和动作决策技能
近日,微软研究团队联合多所高校的研究人员,发布了一款名为 “Magma” 的多模态 AI 模型。这款模型的设计旨在处理和整合图像、文本和视频等多种数据类型,以便在数字和物理环境中执行复杂任务。随着科技的不断进步,多模态 AI 代理正在被广泛应用于机器人技术、虚拟助手和用户界面自动化等领域。以往的 AI 系统通常专注于视觉 - 语言理解或机器人操作,难以将这两种能力结合成一个统一的模型。许多现有模型虽然在特定领域内表现良好,但在不同应用场景中的泛化能力较差。例如

报道称苹果公司正在研发人形机器人
根据最新报道,苹果公司正在积极探索机器人技术,计划开发人形和非人形机器人。这些机器人目前处于内部验证阶段,苹果希望将其整合进智能家居生态系统中。分析师郭明錤在社交平台上透露,苹果的重点是用户与机器人的互动体验,而不是机器人本身的外观设计。苹果的设计理念与三星的智能家居机器人 Ballie 有些相似。Ballie 外形像个篮球,能够在家庭中执行任务,如迎接主人、投影通知等。苹果也正在研究类似的机器人,力求为用户提供更方便的智能家居体验。此外,去年11月,